3D animations in Blender with sound
All 3D animations below have been designed, simulated, and rendered in Blender, an open source 3D modeling software. Most 3D animations make use of either particle, rigid body, smoke, or liquid simulation physics to produce their effects. Specific use cases are addressed for each rendered animation below. Sounds for all videos were edited, arranged, and mixed in Adobe Premiere Pro 2023. All videos have sound, so feel free to unmute the videos and turn your volume up. Thanks! -Scott
Burrowing behavior in bivalves
Bivalves are mollusks that possess a shell consisting of two valves that are hinged together. The mollusks themselves (Phylum Mollusca) include a wide variety of organisms, including gastropods (snails), cephalopods (octopus and squid), and of course the bivalves. Clams, mussels, oysters, cockles, and scallops would all be considered bivalves because they are all mollusks that have a hinged shell that consists of two valves. One of the most characteristic features of mollusks, including bivalves, is the muscular foot. The muscular foot is an organ that can perform different tasks in different groups of mollusks. In the case of gastropods (gastro = stomach; pod = foot) like snails, the muscular foot exists along the base of their body and is used for locomotion. For cephalopods (cephalo = head; pod = foot), the muscular foot has been adapted into grasping tentacles. For bivalves, the muscular foot is used for digging and burrowing and can take the shape of a spade or an anchor depending upon how the bivalve is using it. Not all bivalves are burrowers. Mussels lived attached to rocks. Scallops are actually swimmers that clap their shell open and closed to generate propulsion. An average clam, however, tends to burrow. Should a clam find themselves exposed at the seafloor’s surface, they will begin the process of burrowing to draw themselves down into the sediment. The first step in burrowing occurs when the bivalve extends their muscular foot downward into the sediment. During this action, the muscular foot will take on the shape of a narrow spade (spade = flatter, sharper form of a shovel) to cut down through the sediment. Once the muscular foot has reached its maximum depth, the distal end of the foot will expand into a bulbous anchor. This anchor’s purpose is to wedge itself into the sediment and provide the bivalve an attachment point (like a grappling hook) that can be pulled upon to retract their body and shell downward into the sediment. Once the body and shell have been drawn down into the sediment as far as the muscular foot will allow, the bivalve can then begin the process again and probe even deeper with its narrow spade to find a new anchor point that will allow for further retraction into the sediment. At depth, the bivalve faces the problem of being removed from the ocean and its resources. Fortunately, the bivalve is equipped for this lifestyle. Once submerged below the seafloor, the bivalve will send up a pair of siphons to serve as its lifeline to the ocean above. One siphon inhales seawater from the ocean and draws it into the bivalve’s body where both food and oxygen can be extracted from the water current. The seawater is then exhaled through the second siphon, and this current of water can bring with it both carbon dioxide and other waste products that are expelled from the bivalves body and into the ocean. For the animation, the bivalve model is a simple set of two valves for the shell with a muscular foot and a pair of siphons hidden behind. The valves stay fairly rigid throughout the animation, although the foot and the siphons are scaled upward, downward, and deformed to produce different actions. The burrow creation is generated through displacement of a vertical plane. As the bivalve moves downward, a hidden elongated sphere deforms the plane backward into a shape that roughly corresponds to the shell’s outline. The same is true of the muscular foot, although the foot displaces the vertical plane backward into its exact shape. Animation and models designed and rendered by Scott Mata in Blender v3.6.
Adaptation and attachment in early Paleozoic crinoids and eocrinoids
Crinoids and eocrinoids are groups of echinoderms that resemble each other quite a bit in terms of their long, radiating arms that extend up into the water column to capture food floating by. Eocrinoids (eo = dawn) emerged in the Cambrian Period, and crinoids appeared not long after that in the Ordovician Period. Despite their similarities and chronologies, eocrinoids likely aren’t a direct ancestor to crinoids, although they are not far away on the echinoderm family tree. Crinoids that emerged in the Ordovician, and even crinoids that still exist today, tend to share two characteristics that are essential for their lifestyle. One is a stem (think stem of a flower as an analogy) that consists of columnals, which are disc-shaped plates that stack vertically and allow for a great deal of stem flexibility. The second is a holdfast, which is a root-like structure that crinoids will embed within the sediment (think roots of a tree as an analogy) to serve as a literal anchor that keeps the crinoid rooted to the seafloor. The Paleozoic-style crinoid shown (right) has a stem made of columnals, as well as a holdfast to anchor it within even the most fluid of sediments. The Cambrian-age eocrinoids, Lichenoides (left) and Gogia (center), likely lived a similar lifestyle to crinoids, being largely immobile and using their long arms to filter food from the passing seawater. Where these Cambrian-age eocrinoids differ from the Paleozoic crinoid is in their relationship with the seafloor. Gogia had neither a well-developed holdfast nor a well-developed stem. Rather, both are somewhat merged together into a single feature that likely served the purpose of being a holdfast-like stem or a stem-like holdfast. In either case, the eocrinoid Gogia would not have been nearly as adept as a crinoid when it came to anchoring itself within the seafloor. In the case of Lichenoides, there is no stem, no holdfast, and nothing close to either in its anatomy. So, what does this mean for environmental change between the Cambrian and the Ordovician periods? The likely answer is that Cambrian-age eocrinoids were adapted to a very different seafloor than crinoids that emerged in the Ordovician Period. Seafloors during the Cambrian were likely covered, bound, and held firm by microbial mats that would have allowed Gogia and Lichenoides to embed themselves securely within the seafloor without a complex structure, like a root-like holdfast, to anchor them. With the disappearance of microbial mats and the emergence of thoroughly bioturbated, soft, soupy sediments in the Ordovician Period, the eocrinoid lifestyle of living without a proper holdfast was no longer viable. When crinoids emerged in the Ordovician Period, they showed up with adaptations that were built for life on the new Ordovician seafloor, including a root-like holdfast. To their credit, eocrinoids as a group were not made extinct by this change in seafloor, although they did eventually go extinct in the Silurian Period. Rather, they themselves adapted their own form of stems and holdfasts (more cup-like than root-like) by the Ordovician Period and showed a preference toward attaching to hard surfaces, like shells. This eocrinoid preference for hard substrates in the Ordovician contrasts with crinoids that preferred soft sediments for their root-like holdfasts. And yet, it does reinforce the idea that attachment structures like holdfasts became an essential part of life for eocrinoids and crinoids alike in the Ordovician Period, and both represent adaptations for a life on bioturbated Ordovician seafloors. Animated arm movements for the eocrinoid and the crinoid models were based on armatures that allowed for the keyframing of different arm poses, positions, and transitions between them. Animation and models designed and rendered by Scott Mata in Blender v3.6.

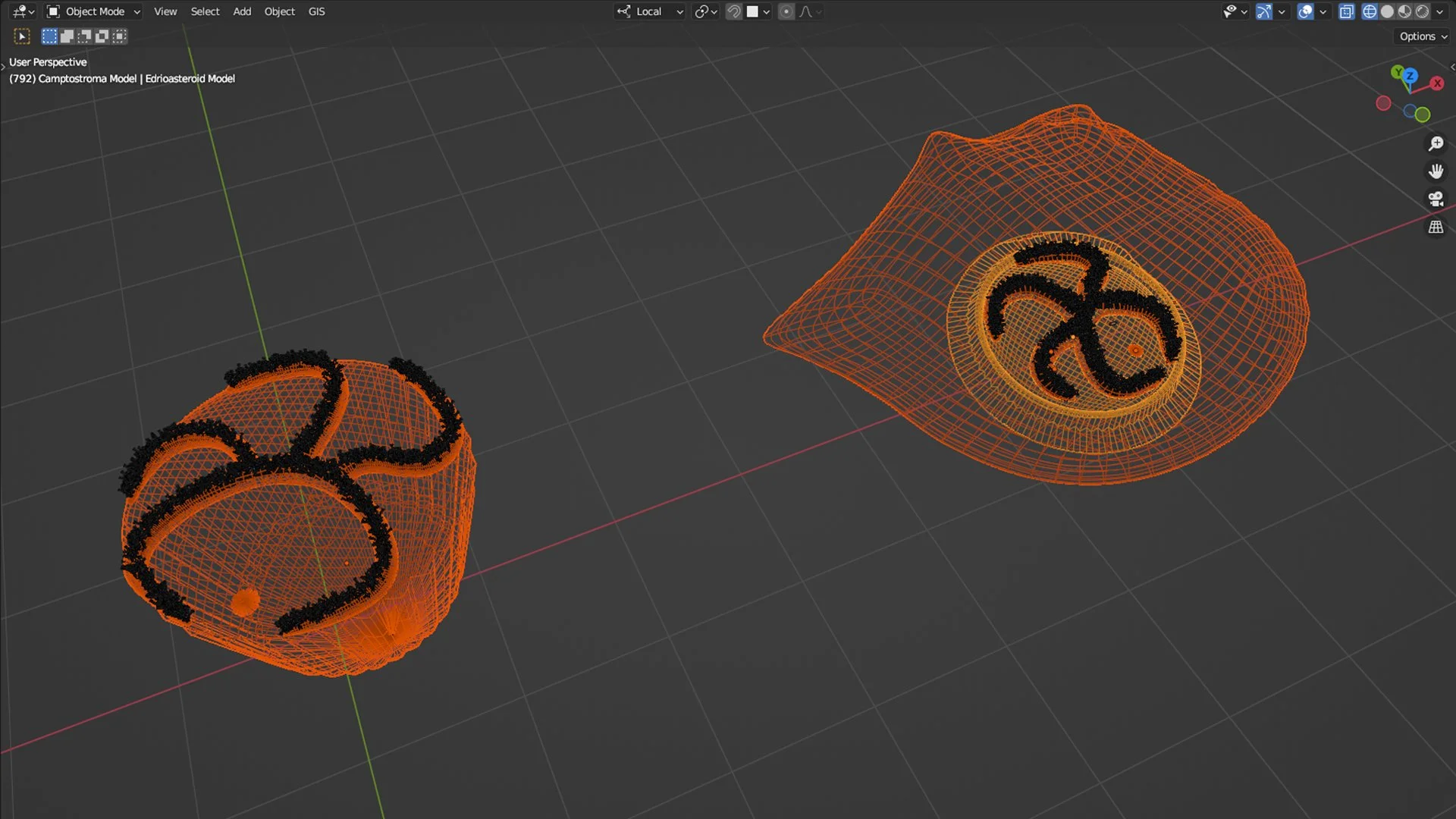
Edrioasteroids and the Cambrian substrate revolution
Edrioasteroids are an extinct group of echinoderms that emerged during the Cambrian Period and went extinct during the Permian Period. They consisted of a disc-like upper surface with five arms radiating across the surface from a central mouth. Below the disc, the body of the edrioasteroid could take one of several forms depending upon their lifestyle. In the Cambrian Period, an edrioasteroid like Camptostroma (left) had a cone-like, tapered body beneath the upper disc that is thought to have been used for embedding itself within a firm, microbially-bound seafloor. In contrast, edrioasteroids living during the later Paleozoic Era, between the Ordovician Period and Permian Period, took on the life of encrusters and would attach their disc-like bodies to hard surfaces like the shells of other animals (right). In this example, we have a typical Ordovician edrioasteroid encrusting an equally typical strophomenid brachiopod. Brachiopods have two valves to their shell, and strophomenids were some of the flattest brachiopods to ever live and would have surely made an ideal attachment surface for encrusting edrioasteroids. So, why the change from a lifestyle of embedding themselves within the seafloor in the Cambrian Period to a lifestyle of encrusting hard surfaces in the Ordovician Period? The thought is that the decline in microbial mats associated with the Cambrian substrate revolution led to a less firm and more fluid seafloor that edrioasteroids like Camptostroma could no longer inhabit because they could no longer maintain an upright and stable position. As a consequence, those edrioasteroids that could adapt to the changing environment seemed to find a preference for hard substrates like shells, and their body shape and lifestyle shifted accordingly. The animation consists mostly of camera movements, although the tube feet on each model are animated using a simple rotational pattern for each tube foot’s curved axis. The shifting boundary between a microbial mat-covered seafloor and a bioturbated seafloor is solely for dramatic effect and certainly doesn’t reflect a real-time event any more than the co-occurrence of Camptostroma (Cambrian Period) and an encrusting edrioasteroid on a strophomenid brachiopod (Ordovician Period) can be considered a synchronous event. It’s all simply for comparison’s sake. Animation and models designed and rendered by Scott Mata in Blender v3.6.
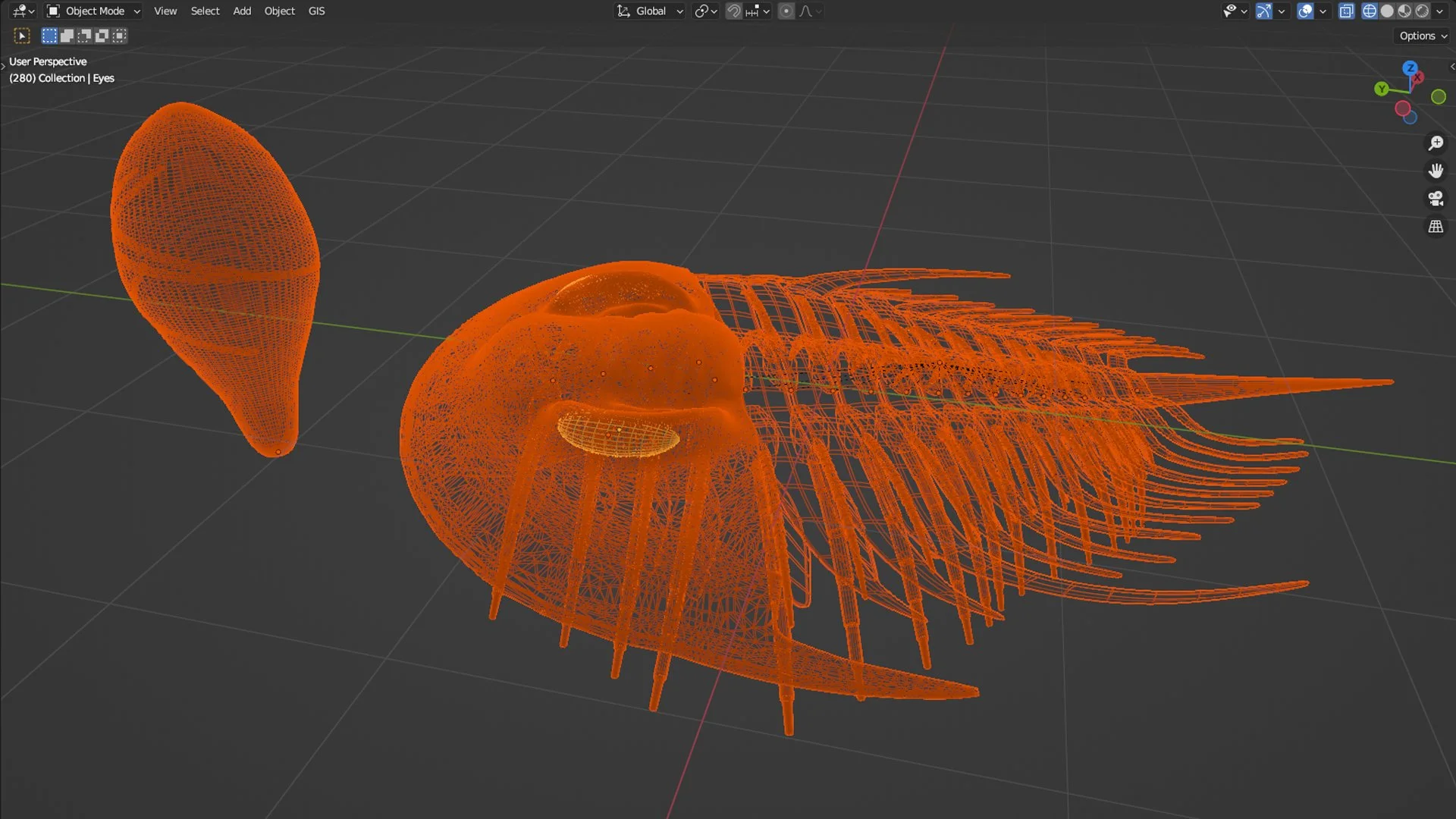
An improbable interaction between Olenellus and Helicoplacus
This animation shows a scientifically and ecologically improbable interaction between the trilobite Olenellus and the helicoplacoid Helicoplacus. As stated in the “Helicoplacoids and the Cambrian Seafloor” section below, the Cambrian Period is a time of transition for the seafloor as the action of burrowing organisms changes it from a firm, mat-covered seafloor to a soft, soupy seafloor. As a consequence, matsticker organisms like helicoplacoids that were adapted to firm, microbial mat-covered seafloors could no longer anchor themselves within the soft, soupy seafloors of the later Cambrian and likely went extinct as a result. It is in this context that this improbable interaction between Olenellus and Helicoplacus takes place. There is no scientific basis for this behavior. Rather, this video exists primarily to test the functionality of a newly designed Olenellus trilobite model, including its head and leg movements. This animation illustrates the capabilities of the Olenellus trilobite model to raise and lower its head, as well as move its legs in a realistic motion during walking. The helicoplacoid model serves primarily as a prop to test this trilobite functionality and do it in the context of the Cambrian Period. In the animation, the helicoplacoid slumps over due to seafloor instability, and the trilobite nudges it back into an upright position. It’s a fun interaction, but that’s all it is. As stated previously, there is no scientific basis for this type of benevolent trilobite behavior, but one could attribute it to poor eyesight and an accidental collision for the sake of the animation. The trilobite Olenellus and the Helicoplacoid Helicoplacus are both known from the Cambrian-age Poleta Formation in the White-Inyo Mountains of California, and they would have likely existed at nearly the same time and possibly lived in similar marine environments. That part is scientifically accurate. The trilobite’s legs are animated using the same method as the horseshoe crab in the “Horseshoe crab walking animation” below. The only difference is the presence of additional legs and an articulation between the head and body that is lacking in the horseshoe crab model. Other than those differences, the motions of the body and the legs are nearly identical to that of the horseshoe crab during walking motion. Trilobite model, helicoplacoid model, and animation designed and rendered by Scott Mata in Blender v3.6.
Helicoplacoids and the Cambrian seafloor
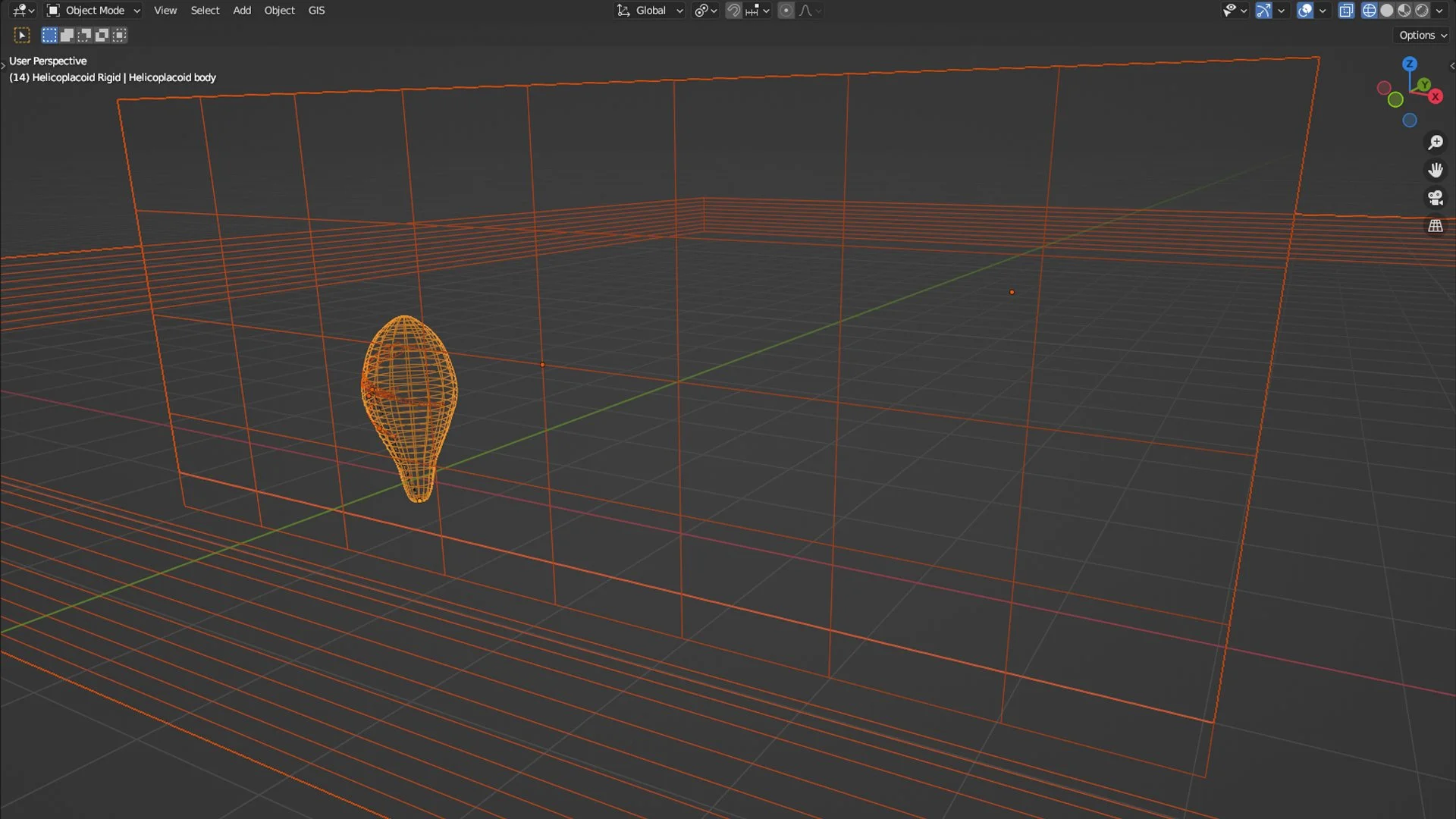
This scenario visualizes the effects of seafloor changes on helicoplacoid echinoderms during the Cambrian Period (541 to 485 million years ago). Helicoplacoids are a form of ancient, extinct echinoderm. Echinoderms also include sea stars, sea urchins, and sand dollars. Helicoplacoids are considered to have lived standing upright with their narrow end embedded firmly within the seafloor, similar to how a golf tee might sit firmly embedded within a dense lawn. For helicoplacoids, this lifestyle was only possible due to the presence of a firm seafloor bound by thick layers of microbes, referred to as microbial mats. This allowed the helicoplacoid to stay firmly embedded, even in the face of strong ocean waves and currents. These microbial mats thrived in the early Cambrian due to limited colonization of the seafloor by animals that might feed on or burrow through these microbial mats and destroy them. In fact, in the early Cambrian, animals were still very new to earth (geologically speaking) and were not nearly as diverse at today. Over the course of the Cambrian Period, however, animals continued to evolve, diversify, and adopt new behaviors. One of those behaviors is vertical burrowing. Prior to the Cambrian Period, vertical burrowing was essentially non-existent. Over the course of the Cambrian Period, however, vertical burrowing becomes increasingly common and increasingly destructive for microbial mats. Microbial mats consist of layers, and vertical burrowing works to destroy those layers. Over time, this burrowing activity essentially eliminates thick microbial mats from the seafloor and, in doing so, changes the consistency of the seafloor. What was once a firmly bound seafloor that helicoplacoids could reliably embed themselves into, becomes a soft, squishly, soupy seafloor that can no longer support them, much like trying to embed a golf tee in liquid mud. This change is considered to be a key reason why the lifestyle that helicoplacoids employed, as well as the helicoplacoids themselves, went extinct during the Cambrian Period. The seafloor was simply no longer accommodating for these sediment stickers. As a consequence, helicoplacoids could no longer stay rooted and could no longer survive in the lifestyle that they had evolved. This scene is designed around a light bulb-shaped helicoplacoid model on a cube-shaped mesh for the seafloor. The passing clouds of sediment are simply semi-transparent images of smoke that sweep across the screen. The animation of the helicoplacoid itself is done with standard key frames. Helicoplacoid model and animation designed and rendered by Scott Mata in Blender v3.6.
Life of a horseshoe crab
This animation illustrates a hypothetical life experience for a horseshoe crab living in the surf, along the beach in a typical east coast United States location. This scenario makes use of a horseshoe crab model, as shown in the walking animation video below this one, as well as a beach scene developed from a mostly flat, rippled plane for the beach, several dune-shaped mesh elements in the background, and a handful of scattered grass elements to add detail. The water in this scenario is a liquid simulation that attempts to recreate the upward surge and subsequent slackening of water associated with swash and backwash activity along a wave-dominated coastline. Horseshoe crab model and animation designed and rendered by Scott Mata in Blender v3.6.

Horseshoe crab walking animation
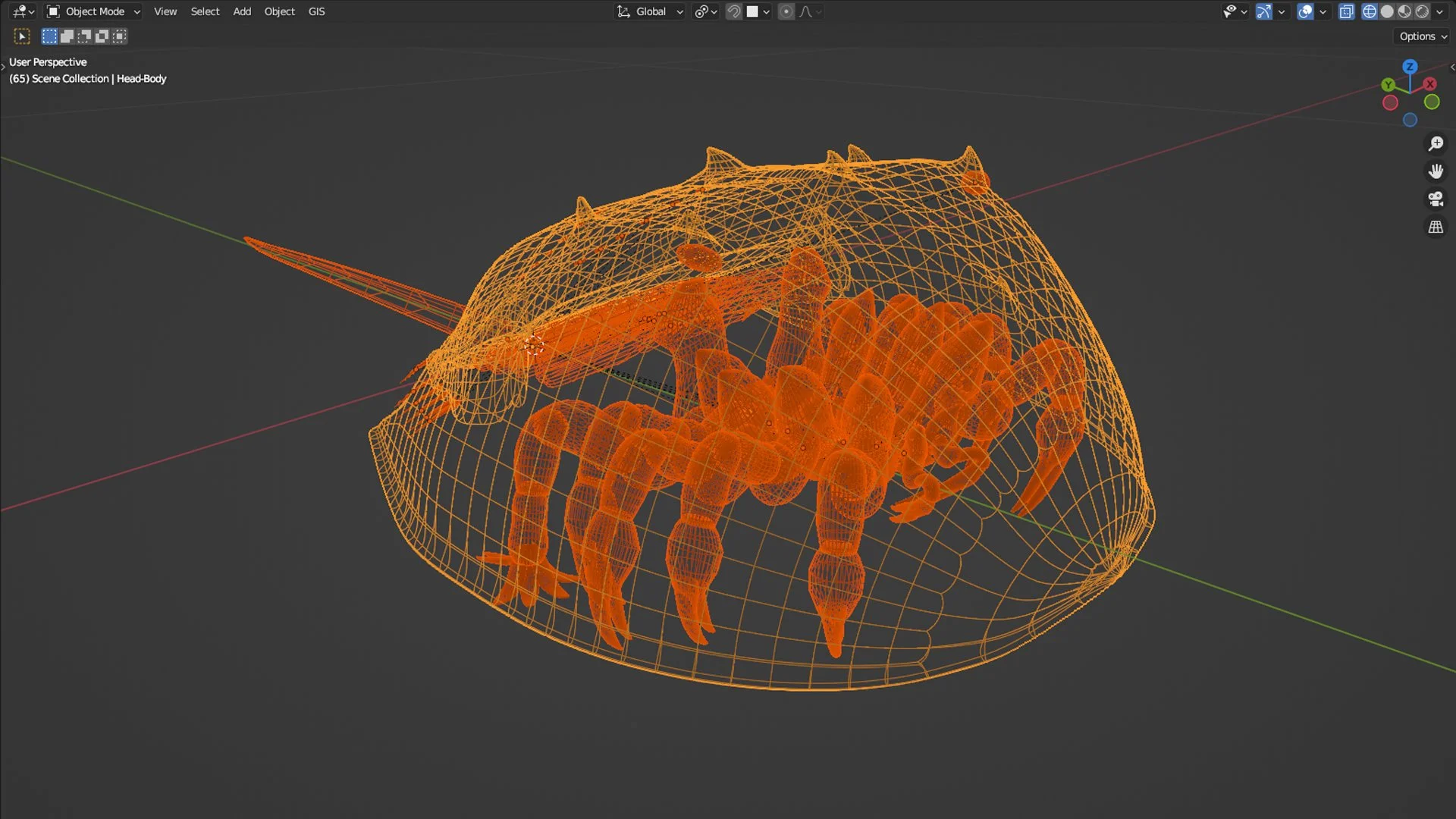
This shows an example of a horseshoe crab walking. Horseshoe crabs are built like an armored vehicle and very little of their leg movement is exposed when they walk across a beach. This example doesn’t attempt to recreate what might be considered the proper and accurate gait and stride of a horseshoe crab. Rather, it’s an attempt to create an animated model of a horseshoe crab that at least appears to be walking in a realistic fashion so that the model can then be used in other animated scenarios and maintain some semblance of reality. This horseshoe crab model was built from scratch, starting with a single hemisphere that would become the body. The hemisphere was split in parts and molded to match the basic shape of a horseshoe crab, and additional ornamentation, like spikes and horns, were added to further the detail. Legs and pincers were modeled and developed to operate independently from the body so that they could be animated. The walking animation consists of multiple moving components that are all based upon sine wave-shaped cycles that repeat. During the walking animation, the body moves both forward and backward, as well as up and down, in a cyclic movement. The legs and pincers beneath the body also swing forward and back, as well as up and down, in a cyclic movement. Even the tail of the horseshoe crab has a subtle up and down movement as it walks. All these cycles operate independently and concurrently to produce the complete walking animation that can be viewed from multiple angles, as seen in this video. Horseshoe crab model and animation designed and rendered by Scott Mata in Blender v3.6.
Particle size and porosity flow simulation
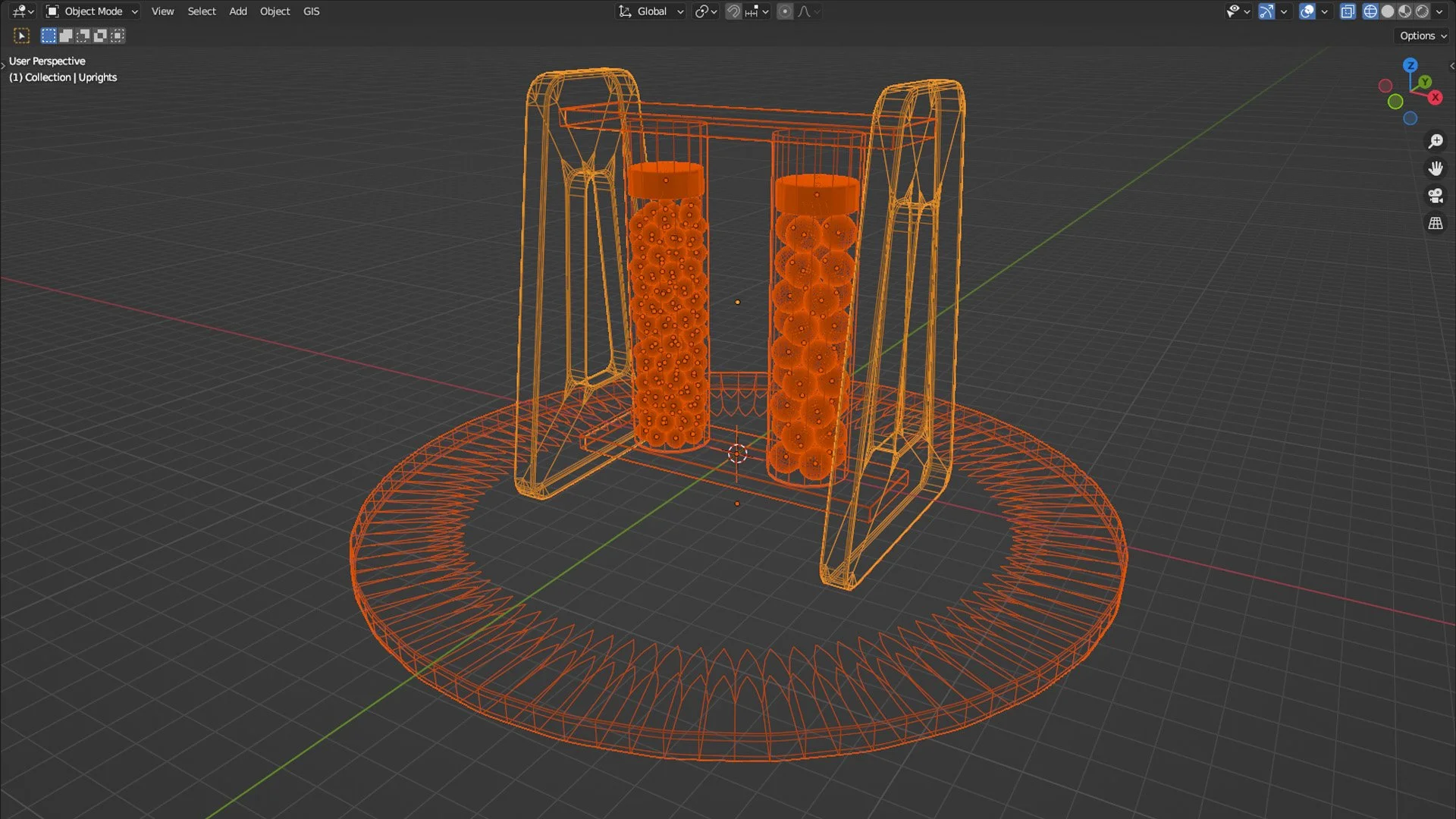
This simulation demonstrates the flow paths and speed of flow for identical fluids passing through two particle collections, reflecting smaller and larger spherical grains. The particles were stacked and distributed using a rigid body simulation that allowed for free fall into the tubes. The gravity-driven flow through the pore spaces between these particles was produced with a liquid fluid flow simulation. After the fluid simulation was baked (calculated) and fixed in place, the particles were hidden to yield the same simulation in isolation to highlight the paths of the fluid through the pore spaces without the particles obscuring the view. Designed and rendered by Scott Mata in Blender v3.6.
Blind thrust fault visualization
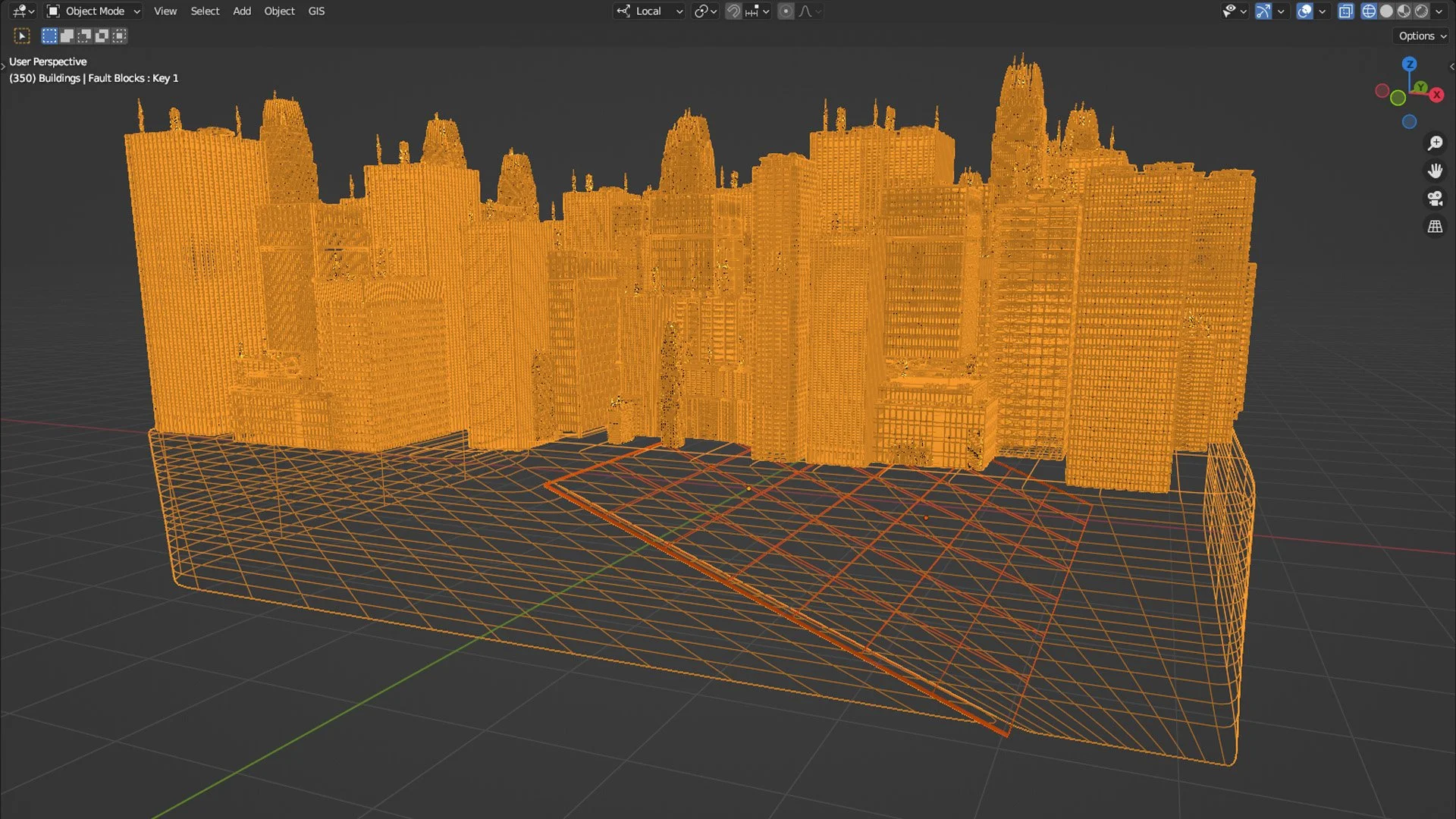
This scenario visualizes the slip, deformation, and resulting earthquake produced by a blind thrust fault similar to the Puente Hills Fault beneath downtown Los Angeles in California. A thrust fault is a low-angle fault produced by compressive stress and, specifically, a blind thrust fault is one that has experienced offset in the subsurface but has yet to rupture at earth’s surface. This scenario is based around a cube-shaped mesh into which a low-angle fault plane has been inserted. The buildings are distributed across the surface of the cube using a particle system. The slip and deformation along the fault were produced by animation alone, key framing between the original mesh and the faulted and deformed mesh. Because the buildings are affixed to the cube-shaped mesh with a particle system, they experience offset when the cube does and therefore rise when the ground is pushed upward on the right side of the fault plane. The shaking following the offset was produced by animating the camera using a noise modifier that simulates shaking in terms of a specified amplitude and frequency. In an attempt to simulate the arrival of P waves, S waves, and surface waves, the shaking goes through three distinct noise patterns. The first moves the camera up and down, the second moves it side to side, and the third moves it in both directions together with an increased amplitude. The buildings never actually shake. It’s only the camera that does. Designed and rendered by Scott Mata in Blender v3.6.
Lava dome volcanic eruption
This lava dome eruption scenario is based around a volcanic-shaped landscape mesh and is intended to simulate a lateral volcanic blast similar to that produced by Mount St. Helens on May 18th, 1980 in Washington state. The eruption consists of a smoke fluid simulation that is connected to two different particle emitters. The emitters release particles, and each particle releases smoke in a radius around it. The first emitter consists of a sphere that stays within the crater during the simulation and launches particles directly upward to produce the rising plume of volcanic ash. The second emitter consists of an arc-shaped bar that travels from the volcanic crater to the boat over the course of the simulation. As the bar emitter travels toward the camera, it launches particles in the direction of the boat that then release smoke to produce the volcanic ash flow that cascades down the front of the volcano and across the lake. Moving the emitter to produce the long travel of the ash flow produced a better result than relying on the smoke simulation to transport the smoke across the lake from an emitter fixed at the volcanic source. Designed and rendered by Scott Mata in Blender v3.6.
Composite cone volcanic eruption
This composite cone eruption scenario is based around a mountain range landscape mesh. The erupted volcanic rock is produced through a particle emission that erupts upward and is blown toward the camera through a directed wind force field. The cloud of volcanic ash is a smoke simulation that is textured into a billowing plume with a turbulence force field. Designed and rendered by Scott Mata in Blender v3.6.
Cinder cone volcanic eruption
This cinder cone eruption scenario is based around a volcanic-shaped landscape mesh. The erupted volcanic rock is produced through a particle emission, which includes a progressive shift in color from red to black as the volcanic material falls and cools. The lava outpouring is produced through a liquid fluid simulation that projects it upward through the air before it collapses down and collides with the volcano’s surface. Designed and rendered by Scott Mata in Blender v3.6.